Gazebo Joint_States . Learn to debug your robot model joints using a graphical interface. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. in gazebo you must not run the joint_state_publisher. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. Follow the steps to add. mastering gazebo simulator full course: in this post, you will learn how to use the joint_state_publisher node. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Instead, you need to run controller plugin (e.g.
from docs.ros.org
Learn to debug your robot model joints using a graphical interface. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Instead, you need to run controller plugin (e.g. Follow the steps to add. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. in gazebo you must not run the joint_state_publisher. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. in this post, you will learn how to use the joint_state_publisher node. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. mastering gazebo simulator full course:
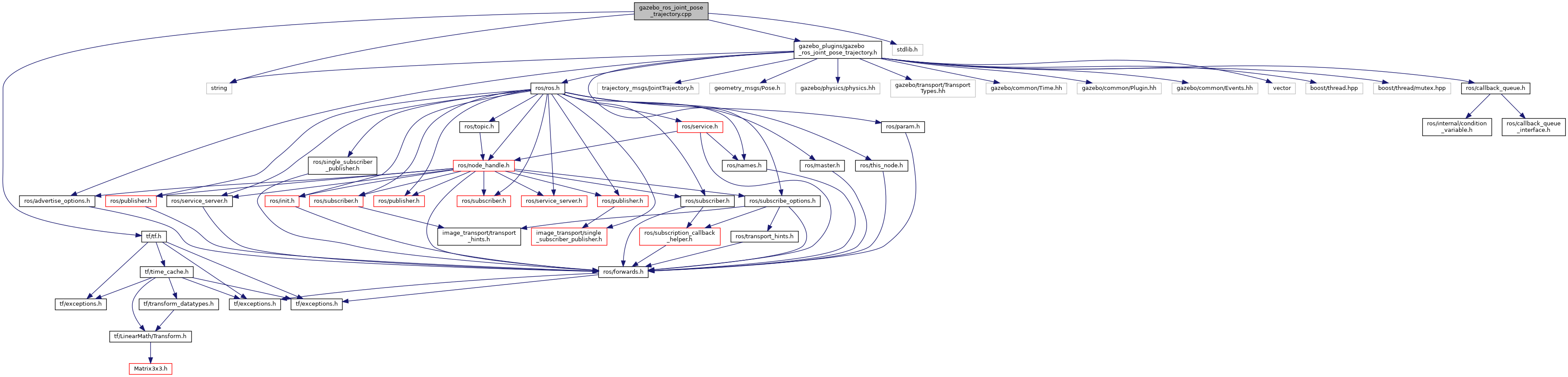
gazebo_plugins gazebo_ros_joint_pose_trajectory.cpp File Reference
Gazebo Joint_States when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. Learn to debug your robot model joints using a graphical interface. Follow the steps to add. in gazebo you must not run the joint_state_publisher. in this post, you will learn how to use the joint_state_publisher node. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Instead, you need to run controller plugin (e.g. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. mastering gazebo simulator full course:
From docs.ros.org
gazebo_plugins gazebo_ros_joint_state_publisher.cpp File Reference Gazebo Joint_States Instead, you need to run controller plugin (e.g. mastering gazebo simulator full course: Follow the steps to add. in gazebo you must not run the joint_state_publisher. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. . Gazebo Joint_States.
From pergoladrafts.com
Hexagonal Gazebo Plans For 8 Feet Summerhouse Gazebo Joint_States mastering gazebo simulator full course: Learn to debug your robot model joints using a graphical interface. in gazebo you must not run the joint_state_publisher. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. Follow the steps to add. in this post, you will learn how to use the joint_state_publisher node. . Gazebo Joint_States.
From www.pinterest.fr
How to build a gazebo roof HowToSpecialist How to Build, Step by Gazebo Joint_States gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. in this post, you will learn how to use the joint_state_publisher node. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. Follow the steps to add. Instead, you need to run. Gazebo Joint_States.
From www.thespruce.com
7 Free Wooden Gazebo Plans You Can Download Today Gazebo Joint_States Learn to debug your robot model joints using a graphical interface. mastering gazebo simulator full course: in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. Follow the steps to add. learn how to use ros_control packages and gazebo plugins to actuate the. Gazebo Joint_States.
From index.ros.org
ROS Package ros_ign_gazebo_demos Gazebo Joint_States when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. in this post, you will learn how to use the joint_state_publisher node. Follow the steps to add. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. gazebo. Gazebo Joint_States.
From diydeckplans.com
Gazebos How to Frame Your Gazebo Roof DIY Deck Plans Gazebo Joint_States in this post, you will learn how to use the joint_state_publisher node. mastering gazebo simulator full course: in gazebo you must not run the joint_state_publisher. Follow the steps to add. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. gazebo provides three joint controller plugins which. Gazebo Joint_States.
From docs.ros.org
gazebo_plugins gazebo_ros_joint_pose_trajectory.cpp File Reference Gazebo Joint_States Instead, you need to run controller plugin (e.g. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Learn to debug your robot model joints using a graphical interface. mastering gazebo simulator full course: Follow the steps to. Gazebo Joint_States.
From blog.csdn.net
使用gazebo在ROS中仿真_gazebo 船上CSDN博客 Gazebo Joint_States Instead, you need to run controller plugin (e.g. in this post, you will learn how to use the joint_state_publisher node. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. mastering gazebo simulator full course: Follow the steps to add. Learn to debug your robot model joints using a graphical interface. in. Gazebo Joint_States.
From www.pinterest.com
Close up of gazebo joint Diy pergola, Pergola, House front Gazebo Joint_States learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Instead, you need to run controller plugin (e.g. in this post, you will learn how to use the joint_state_publisher node. mastering gazebo simulator full course: when using ros_control, the /joint_states topic is published by an instance of the. Gazebo Joint_States.
From answers.ros.org
gazebo_joint_state_publisher sends wrong velocities in the joint states Gazebo Joint_States in gazebo you must not run the joint_state_publisher. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. mastering gazebo simulator full course: Instead, you need to run controller plugin (e.g. Follow the steps to add. Learn. Gazebo Joint_States.
From diydeckplans.com
Gazebos How to Frame Your Gazebo Roof DIY Deck Plans Gazebo Joint_States learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Learn to debug your robot model joints using a graphical interface. Follow the steps to add. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. mastering gazebo simulator full course: Instead, you need to. Gazebo Joint_States.
From timberframehq.com
12×12 Gazebo Plans Timber Frame HQ Gazebo Joint_States Follow the steps to add. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Learn to debug your robot model joints using a graphical interface. Instead, you need to run controller plugin (e.g. in this post, you will learn how to use the joint_state_publisher node. when using ros_control,. Gazebo Joint_States.
From www.woodberry.co.uk
Cedar Wood Gazebo close up roof and leg joint Woodberry Gazebo Joint_States in gazebo you must not run the joint_state_publisher. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Learn to debug your robot model joints using a graphical interface. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. Follow the steps. Gazebo Joint_States.
From github.com
velocity got from /joint_states is wrong? · Issue 830 · rossimulation Gazebo Joint_States in this post, you will learn how to use the joint_state_publisher node. when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. Instead, you need to run controller plugin (e.g. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. learn how to use ros_control packages and gazebo plugins to actuate. Gazebo Joint_States.
From wiki.ros.org
steer_bot_hardware_gazebo ROS Wiki Gazebo Joint_States Follow the steps to add. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. in this post, you will learn how to use the joint_state_publisher node. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Learn to debug your robot model joints using a graphical interface.. Gazebo Joint_States.
From wiki.ros.org
steer_bot_hardware_gazebo ROS Wiki Gazebo Joint_States in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. mastering gazebo simulator full course: when using ros_control, the /joint_states topic is published by an instance of the jointstatecontroller. Instead, you need to run controller plugin (e.g. in gazebo you must not. Gazebo Joint_States.
From www.youtube.com
Lesson 002 (URDF + Gazebo) Part 3 Joint state publisher YouTube Gazebo Joint_States Instead, you need to run controller plugin (e.g. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Follow the steps to add. Learn to debug. Gazebo Joint_States.
From zhuanlan.zhihu.com
Moveit+Gazebo仿真 知乎 Gazebo Joint_States learn how to use ros_control packages and gazebo plugins to actuate the joints of your robot in simulation. Learn to debug your robot model joints using a graphical interface. in order to simulate these robots in gazebo, a way to set a gazebo model joint state to the drivers joint state is required. mastering gazebo simulator full. Gazebo Joint_States.